+48 571 236 326
+48 539 551 008





Kontroler lotu CrazyF411 ELRS jest wyposażony w zintegrowany odbiornik UART 2,4 GHz ExpressLRS i 20 A Blheli_s ESC (wstępnie zainstalowane oprogramowanie układowe Bluejay), który może obsługiwać 2-4 s. Większy Mosfet może obsługiwać prądy wysokie do 20 A, co byłoby lepsze dla dronów typu wykałaczka 2-4 S lub dronów FPV dalekiego zasięgu. A ponieważ odbiornik ExpressLRS 2,4 GHz jest wyposażony w układ częstotliwości radiowej SX1280 o wysokiej czułości, wysokiej szybkości pakietów i niskim opóźnieniu, ten kontroler lotu jest tym, czego potrzebują wszyscy piloci Race/Freestyle. Wbudowany odbiornik ELRS komunikuje się z MCU za pomocą UART, jest taki sam jak Happymodel EP1, którego oprogramowanie układowe można aktualizować za pomocą betaflight pass-through lub WIFI, bardzo proste. Domyślne oprogramowanie układowe to ELRS V3.0.1. Ten kontroler lotu byłby używany dla Crux35 zamiast kontrolera lotu ELRS X1.
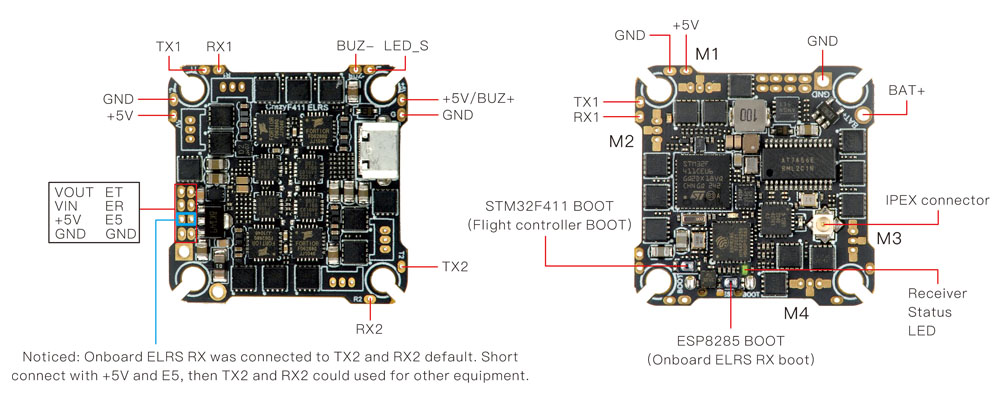
*Pola „ET” i „ER” służą do komunikacji z ESP8285, możesz podłączyć „TX” narzędzia FTDI do pola „ET” i podłączyć „RX” narzędzia FTDI do pola „ER” w celu uaktualnienia oprogramowania układowego odbiornika UART ELRS. Przedtem należy zewrzeć pola „+5V” i „E5”.
Kontroler lotu
MCU: STM32F411CEU6 (100 MHz, 512 K FLASH)
Czujnik: ICM42688P lub BMI270 (sterowanie SPI)
Wzór montażowy: 25,5 × 25,5 M2
Wymiary: 32x28x9 mm
Zasilanie: 2-4S LiPo
Regulator: 20A Blheli_s ESC
Wbudowany Betaflight OSD (sterowanie SPI)
Wbudowany odbiornik UART ExpressLRS 2,4 GHz
Wbudowany 5 V 1,5 A BEC
Oprogramowanie układowe kontrolera lotu: CRAZYBEEF4DX
ESC
Wbudowany 4w1 ESC
MCU uaktualnione do EFM8BB21
Zasilanie: 2-4S LiPo/LiPo HV (7v/17v)
Prądy: 20A ciągły szczyt 25A (5 sekund)
Obsługa programowalnego BLHeliSuite
Firmware fabryczny: Bluejay 0.18.1 Firmware docelowy: F_H_40_48_v0.18.1
Protokół domyślny: DSHOT150/DSHOT300/DSHOT600
Odbiornik
Wbudowany UART ExpressLRS 2,4 GHz
Opcja szybkości pakietów: 25Hz/50Hz/150Hz/250Hz/500Hz
Częstotliwość RF: 2,4GHz Wtyczka antenowa: IPEX
Wyjście telemetryczne Moc: <12dBm
Protokół odbiornika: CRSF
Domyślna wersja oprogramowania układowego: ExpressLRS V3.0.1
Docelowe oprogramowanie układowe: HappyModel EP1/2 2400 RX
Ustawienia mierników napięcia i natężenia prądu na pokładzie
Ustawienie skali woltomierza 110
Ustawienie skali amperomierza 470
Zasilaj kontroler lotu przez wtyczkę USB, poczekaj, aż zielona dioda LED na FC zgaśnie, natychmiast wyłącz zasilanie, a następnie powtórz powyższe kroki. Gdy FC zostanie włączony po raz trzeci, zielona dioda LED zacznie migać dwukrotnie, co oznacza, że RX przechodzi w tryb wiązania.
Upewnij się, że oprogramowanie układowe modułu ExpressLRS tx to v3.xx i przejdź do ExpressLRS.lua z menu „TOOLS” swojego nadajnika radiowego. Następnie naciśnij [Bind], aby powiązać z pokładowym odbiornikiem ExpressLRS. Zielona dioda LED powinna najpierw powoli migać, a następnie zmienić się na stałe, co oznacza, że powiązanie zostało pomyślnie wykonane. Jeśli zielona dioda LED nadal będzie migać dwukrotnie po powiązaniu, zmień wartość zakładki Model Match z „off” na „on” lub z „on” na „off”
Ciągłe światło zielonej diody LED oznacza, że łączenie powiodło się lub nawiązano połączenie RC; podwójne mignięcie zielonej diody LED oznacza przejście w tryb wiązania; powolne mignięcie zielonej diody LED oznacza brak sygnału wejściowego RC z modułu TX; ciągłe szybkie mignięcie zielonej diody LED oznacza, że ExpressLRS jest włączony.